Translation
Recall that the pose of an object (or a coordinate frame) includes both its position and orientation relative to the parent coordinate frame. Representing the position is straightforward. Three numbers may be used to represent a translation
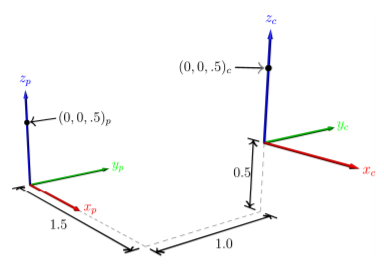
of the object along each of the three axes of the parent coordinate frame.Figure shows two coordinate frames separated by a simple translation. In this example, the child coordinate frame is located at position (1.5, 1.0, .5) in the parent
coordinate frame. We will use subscripts to indicate the coordinate frame associated with a point or pose. For example, (0, 0, .5)c, refers to the point (0, 0, .5) in the child coordinate frame. When coordinate frames are separated by
a pure translation transforming points between frames is straightforward: we only need to add or subtract the three coordinate offsets. For example, the point (0, 0, .5)c is located at (0 + 1.5, 0 + 1.0, .5 + .5) = (1.5, 1.0, .5) in the
parent coordinate frame. Moving from the parent to the child requies us to subtract instead of add: (0, 0, .5)p is located at (−1.5, −1.0, 0) in the child frame.
 Previous
Previous